Project title: Human-Swarm Interaction through Natural Language Processing
Keywords: Swarm, Multi-agent system, Human-Robot Interaction, Natural Language Processing (NLP)
Abstract: In the recent years, there has been a rapid growth in the field of Technology, which made it possible to produce high-performance robots in reduced cost and size. As a result, nowadays, it is possible to deploy a large amount of robots that collaborate with each other autonomously in a wide variety of applications, starting from search and rescue to theatrical performance. Researchers in the domains of bio-inspired Robotics and Control Theory are coming up with new approaches to the give the robotic swarms more autonomy. Although there might be a high degree of autonomy in the swarm system, full or partial presence of human operator, who interact with the system, is always more beneficial to avoid the shortcomings of autonomy. To achieve tangible interaction, a number of approaches such as tactile wearables, hand gesture recognition, etc. have been proposed. However, all these approaches have very narrow channel of information exchange and the most natural and productive way to interact with the swarm is yet to be discovered. In this work, we are applying Natural Language Processing (NLP) to build a rich and intuitive interaction approach in which a human operator interacts with the swarm by giving and receiving sufficient information to support task fulfillment. We also provide real-life swarm applications on the above-mentioned approach: a) object manipulation using a swarm of nano-quadcopter and b) formation control using a feedback from the user.
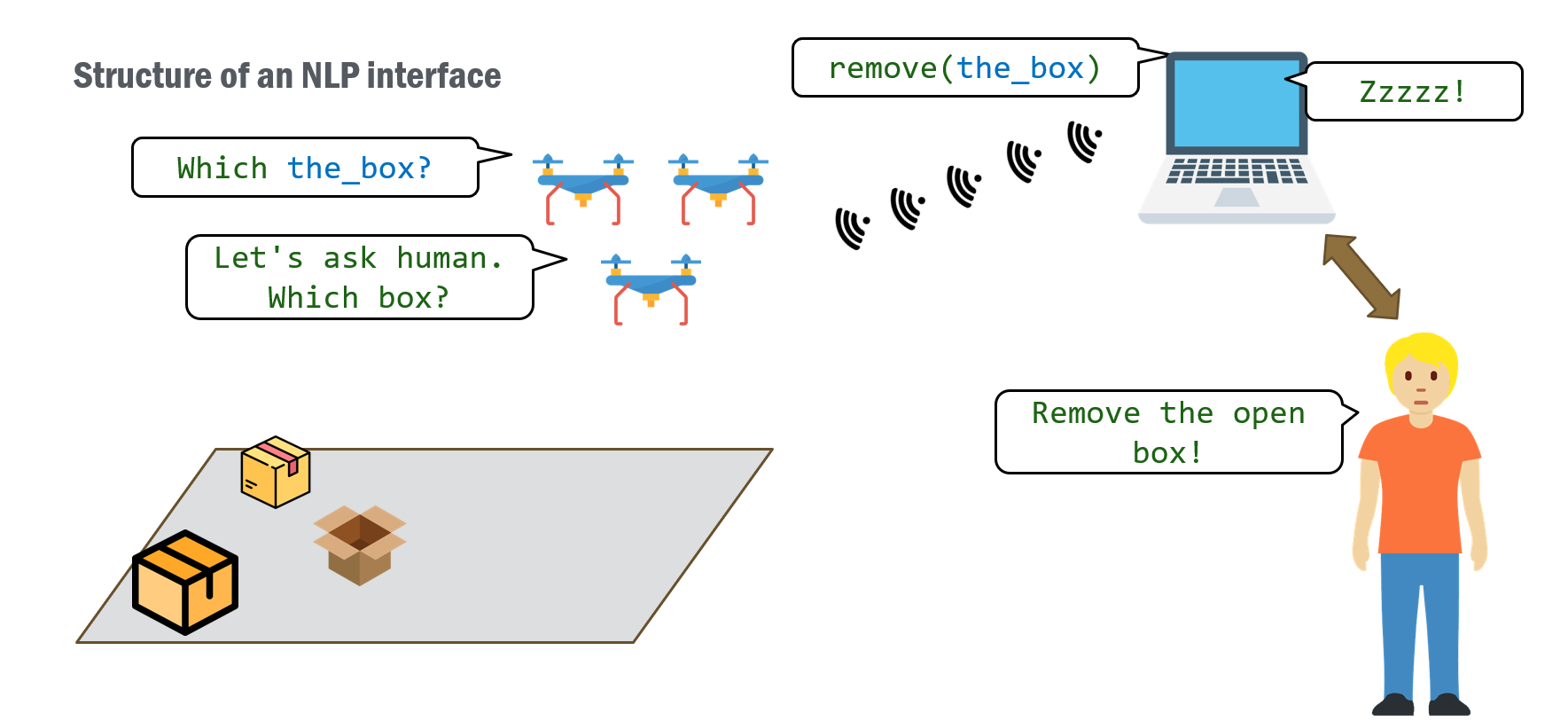
Architecture: Natural language will be the interface to control the Swarm
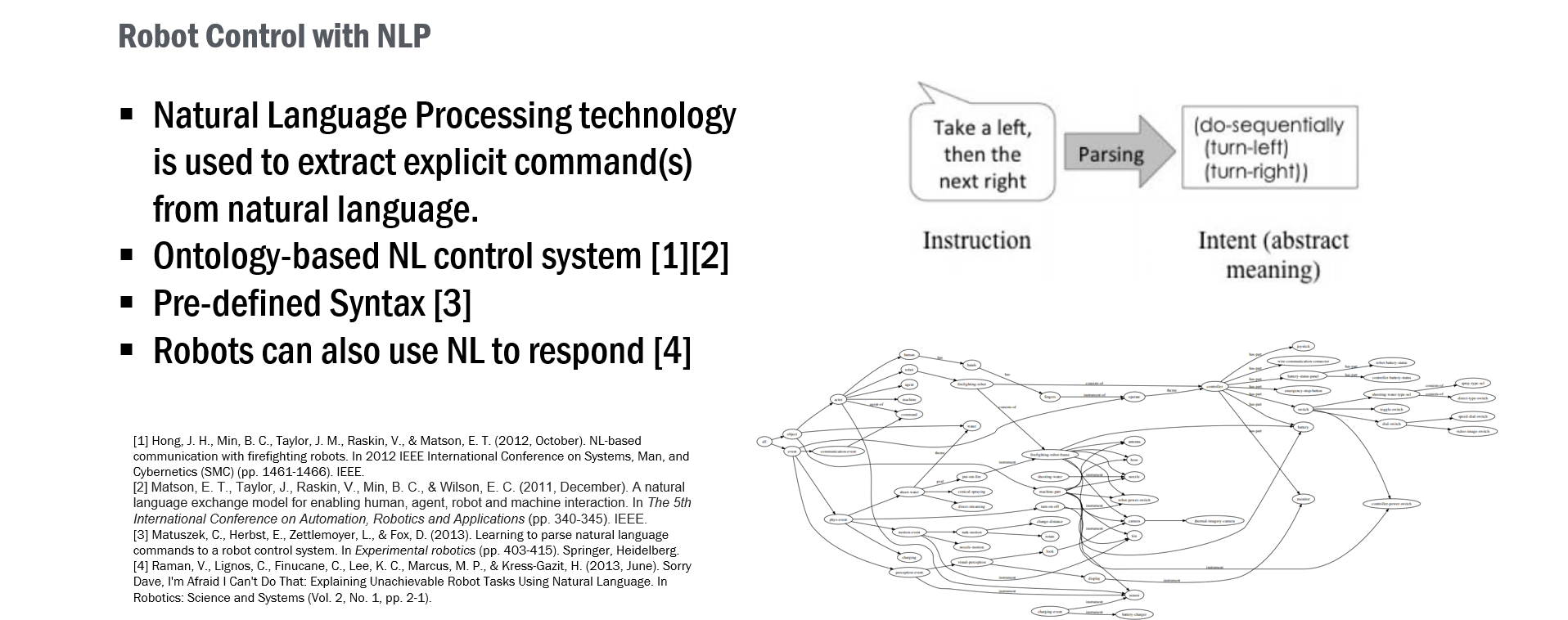
Literature Review:
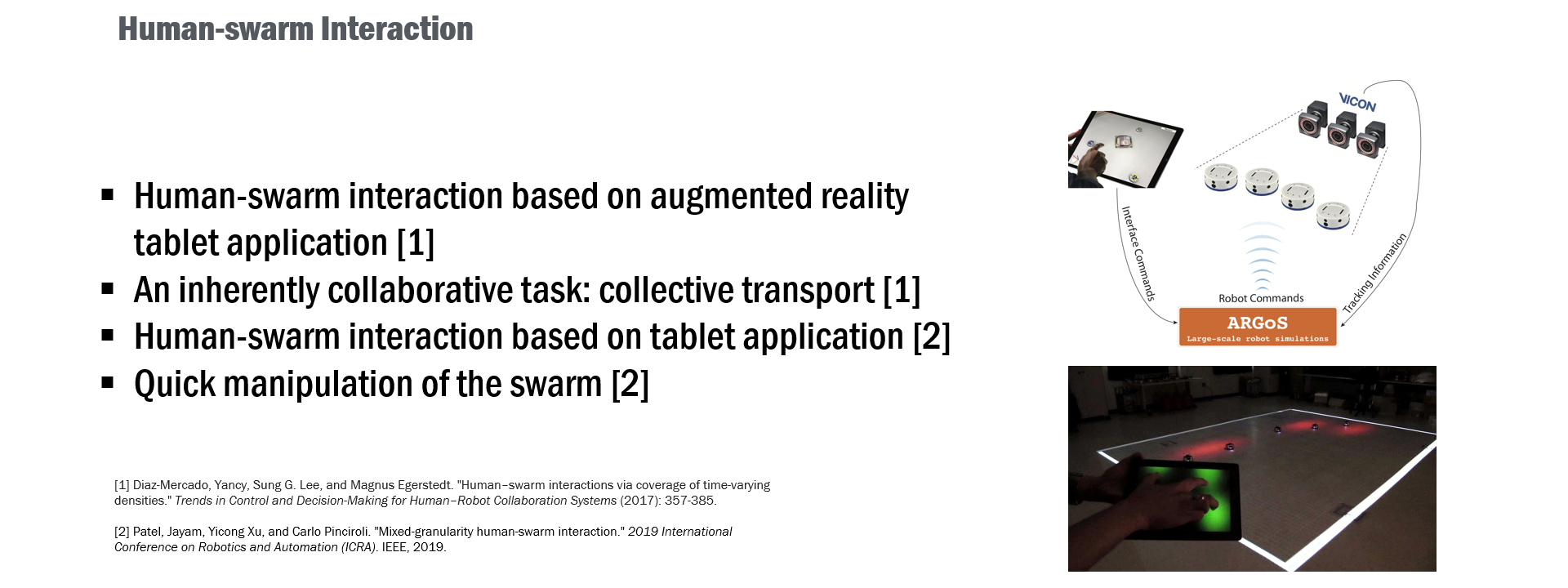
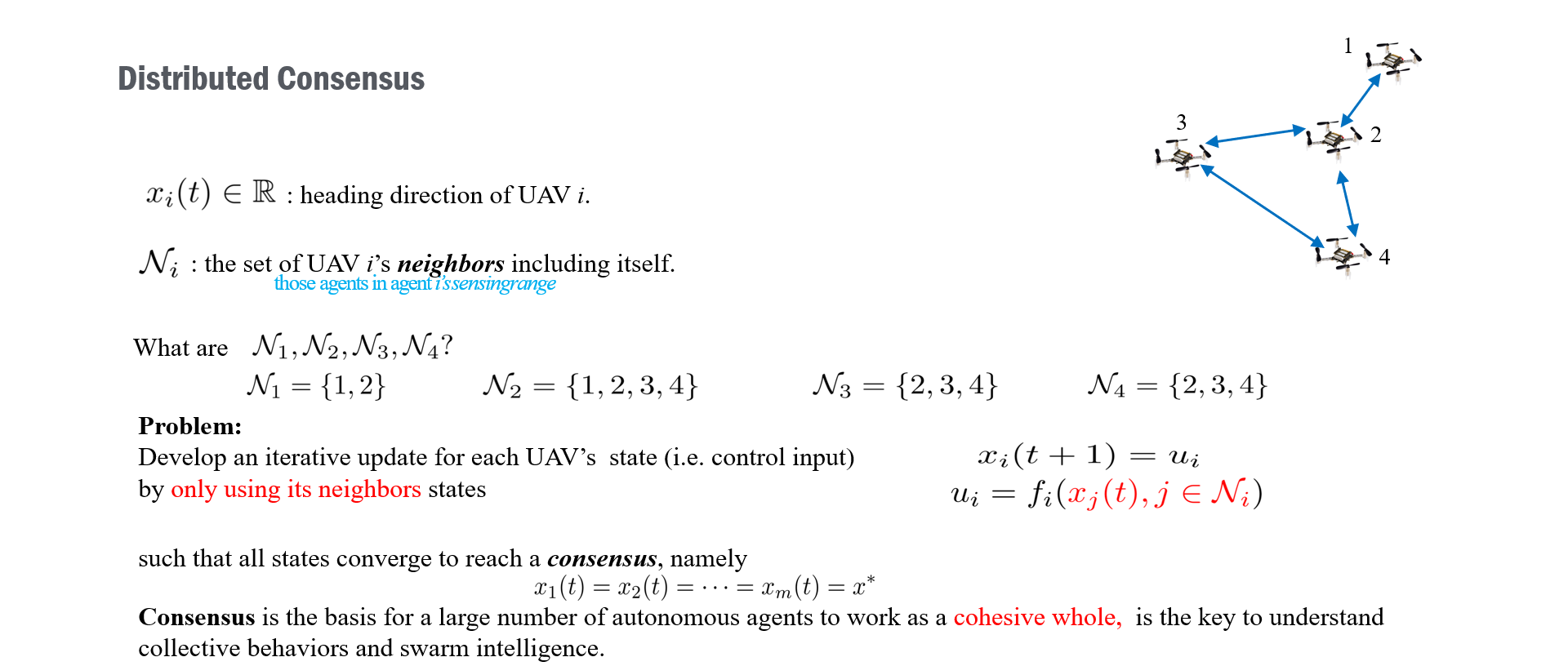
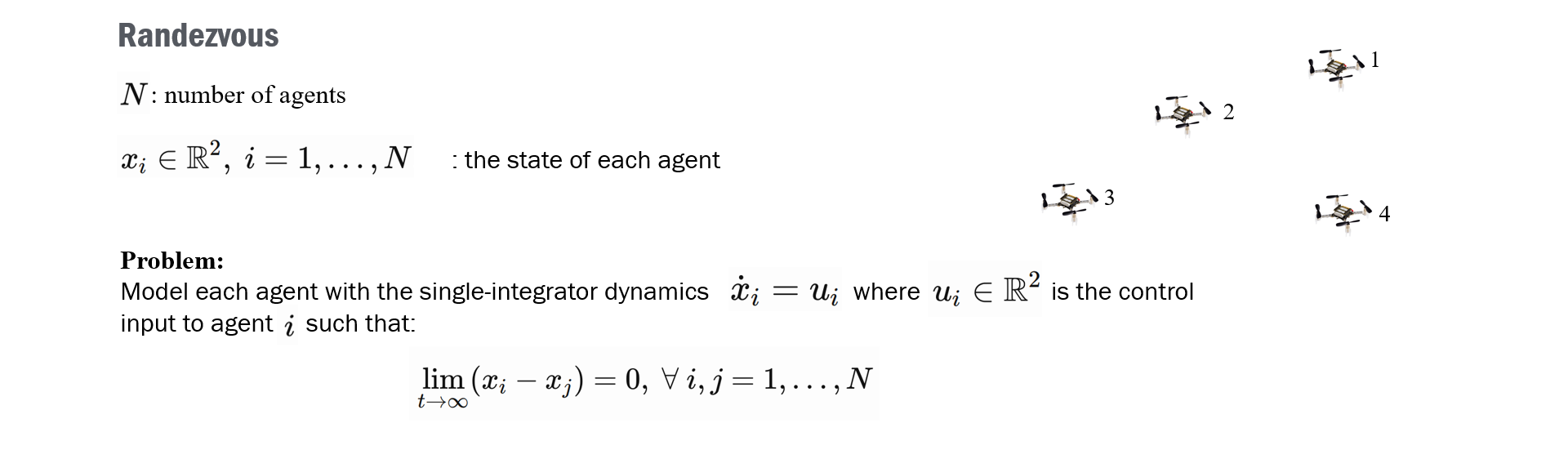
Approach on the Swarm aspect: Consensus and randezvous
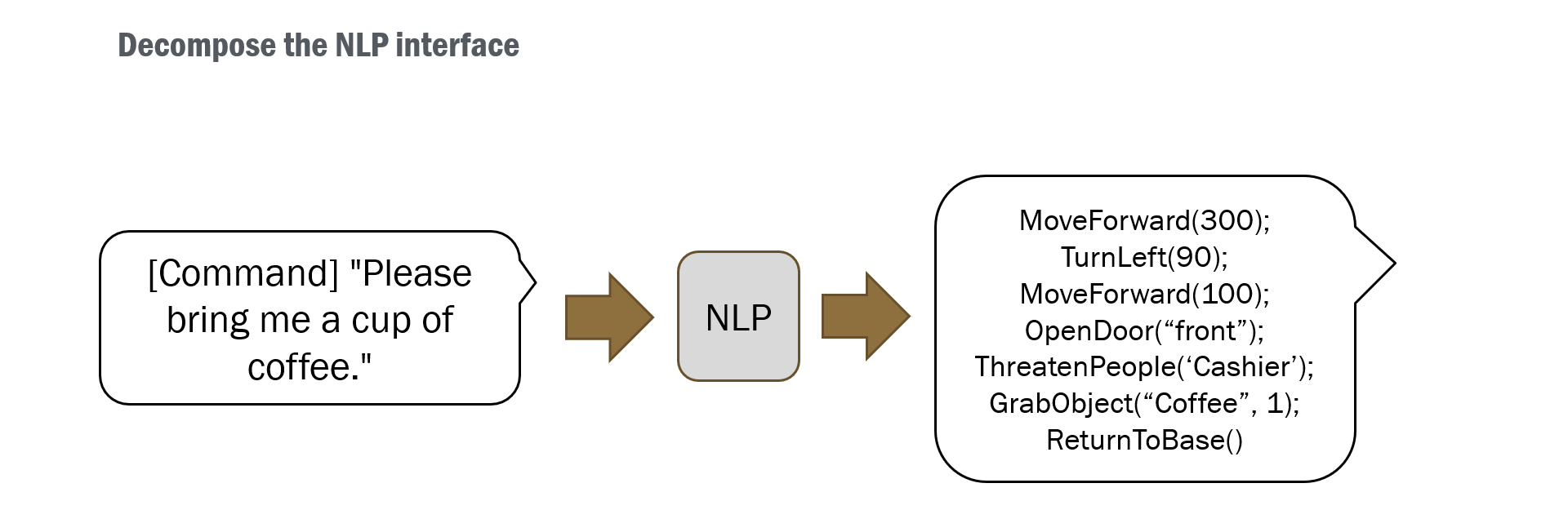
Approach on the NLP aspect: Map implicit natural language commands to explicit action(s)
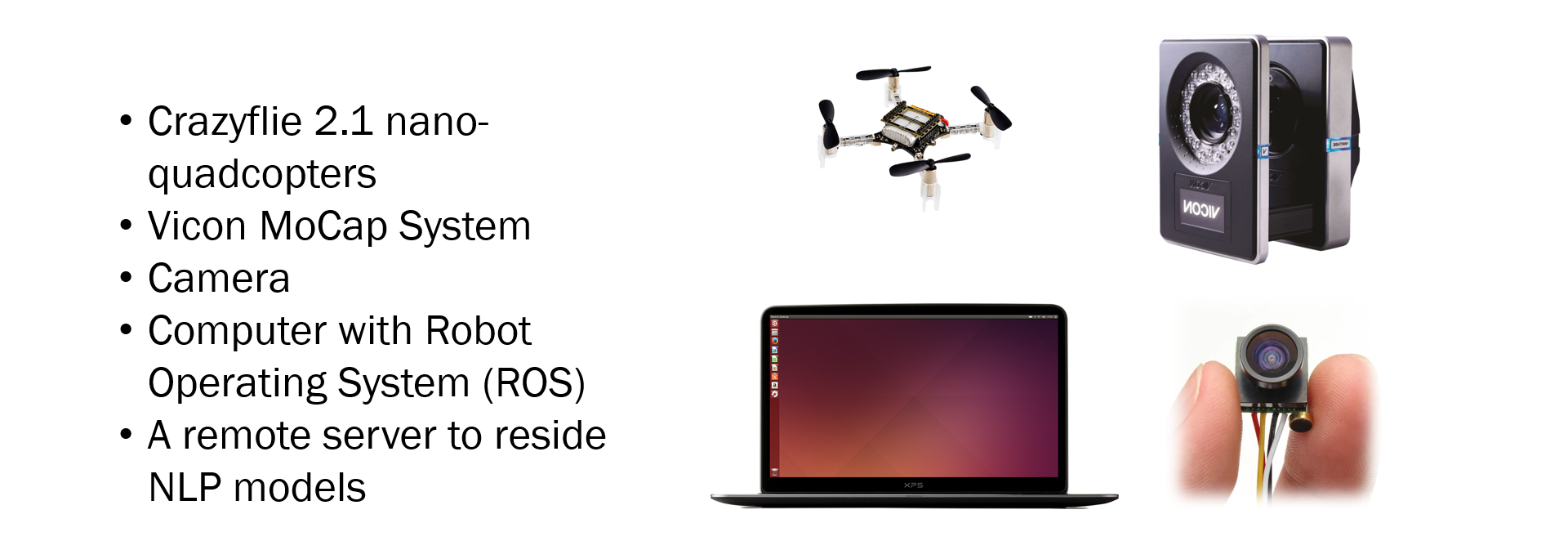
Equipment List:
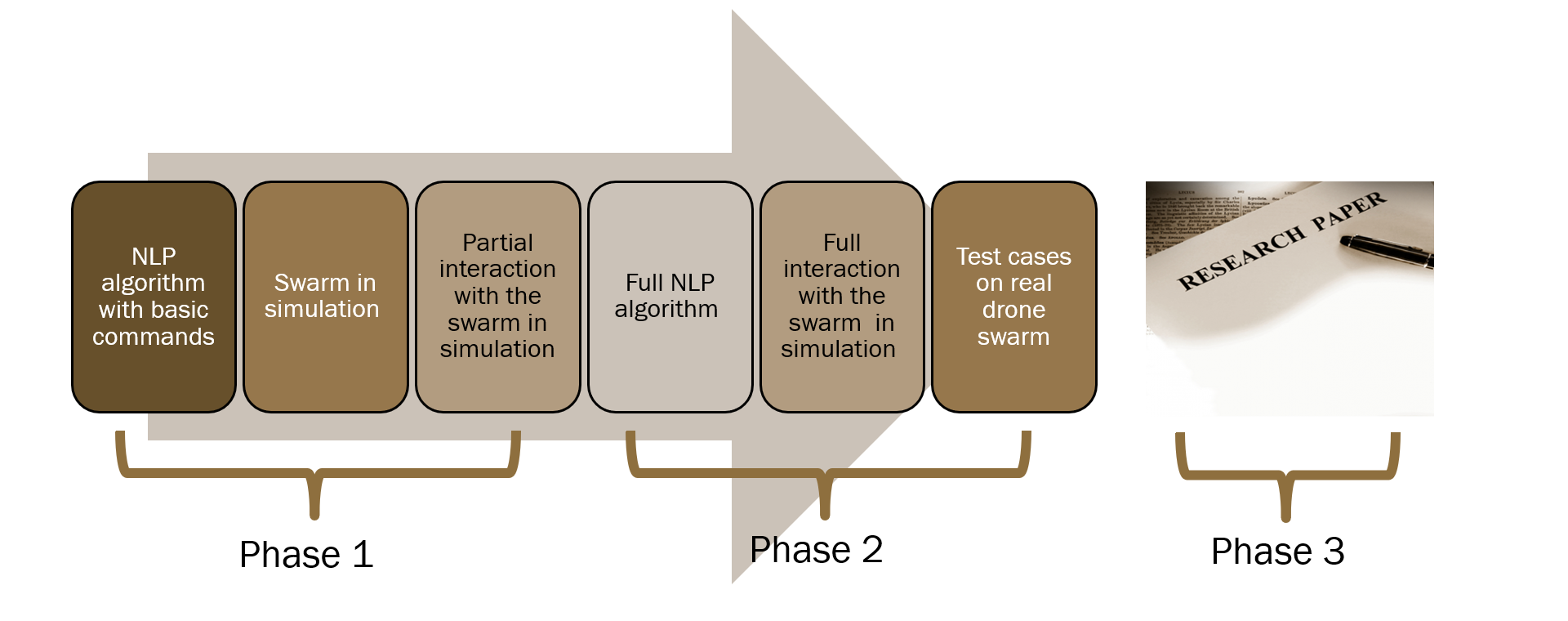
Schedule (Phase 3 could happen after the end of the semester):
Click Here to download the full proposal presentation slides. Thank you!